
I got the Spirit FBL and a Jeti ds-16.
Now I liked to do a simple setup, but I'm stuck with the ds-16 programming. Any advise is welcome.
I have gone through the Spirit Manual, and I have visited different forums. With the ds-16 transmitter it appears to me, that I'm best off to do the bank switching of the Spirit fbl based on the flight mode.
In other words I liked to create five flight modes in my ds-16:
- rescue (switch to bank 1 -> stabi function configured for rescue)
- stabilized (switch to bank 2 - > stabi function configured for stabilization)
- normal (bank 0 -> basic configuration)
- idle 1 (bank 0 -> basic configuration)
- idle 2 (bank 0 -> basic configuration)
I'm now working through the Jeti documentation and through the forums to figure, what I have to do to switch the bank in the Spirit fbl based on the flight mode. I switch flight mode normal/idle 1/idle 2 with switch SA, switch SB is throttle cut, the switch with the spring SG is rescue, and moving the switch SE to 0% or 100% is stabilized mode.
I've tried it with logical switches, but so fare I have not found a suitable solution. Maybe somebody else has done a similar setup already.
In an openTX transmitter like the Taranis+ I would program this setup in no time, but Jeti is something else (let's say chaotic). Maybe somebody out there can give me a hint how to setup my ds-16 (please do not mention the German Jeti forum - I don't intend to fill the size of my underware into their registration form).
thx
Jeti ds-16 setup issues
It is not that hard.
First from all you can create Bank function and assign it to the switch SE.
Then you have to create Flight modes and assign it to SA.
Here you have to create new flight mode "Rescue" and assign it to SG.
Make sure to change position accordingly, because position determines priority.
And lastly you have to setup Gyro Gains for each Flight Mode.
Check my screenshots.
This is the simplest way.
First from all you can create Bank function and assign it to the switch SE.
Then you have to create Flight modes and assign it to SA.
Here you have to create new flight mode "Rescue" and assign it to SG.
Make sure to change position accordingly, because position determines priority.
And lastly you have to setup Gyro Gains for each Flight Mode.
Check my screenshots.
This is the simplest way.
- Attachments
-
-
-
-
-
-
-
Spirit System developer
Thx for your answer.
I realized the logic in the ds-16 is the same like programming an old PLC (programmable logic controller, e.g. a Siemens S5 SPS).
I achieved the bank switching with two logical switches:
- Se and Sg connects into a Multi Switch
- the output of the Multi Switch and Sg connects into an OR Switch
With this logic I get 100% output, whenever I pull Sg, 0% output for Se in the middle or upper position, and -100% when both switches, Se and Sg are in lower position.
The idea behind this logic is to limit the output value for Se to -100% in the lower position and 0% for the middle and the upper position. Then I feed this signal into an OR switch and combine it with Se. So whatever signal is higher will be on the output. It means Se has priority. Whenever I pull Se I have +100%. Whenever I move Sg into middle or upper position I get 0%.
With this setting I have Bank 0 on -100% for the normal flight modes, Bank 1 on 0% for the stabilzed flight mode, and bank 2 on 100% for the rescue mode.
I will post the switch settings.
I realized the logic in the ds-16 is the same like programming an old PLC (programmable logic controller, e.g. a Siemens S5 SPS).
I achieved the bank switching with two logical switches:
- Se and Sg connects into a Multi Switch
- the output of the Multi Switch and Sg connects into an OR Switch
With this logic I get 100% output, whenever I pull Sg, 0% output for Se in the middle or upper position, and -100% when both switches, Se and Sg are in lower position.
The idea behind this logic is to limit the output value for Se to -100% in the lower position and 0% for the middle and the upper position. Then I feed this signal into an OR switch and combine it with Se. So whatever signal is higher will be on the output. It means Se has priority. Whenever I pull Se I have +100%. Whenever I move Sg into middle or upper position I get 0%.
With this setting I have Bank 0 on -100% for the normal flight modes, Bank 1 on 0% for the stabilzed flight mode, and bank 2 on 100% for the rescue mode.
I will post the switch settings.
I have made some screen shots of the logical switches. I use logical switch L4 for the Bank selection in the Function Assignment menu of the ds-16









free ebay photo hosting
free ebay photo hosting
After creating a "Rescue" flight mode and assigning switch SG. How are you connecting this flight mode to the bank settings in the Spirit software? Are you using a mix or logical switches? Thanks!ZeXx86 wrote:It is not that hard.
First from all you can create Bank function and assign it to the switch SE.
Then you have to create Flight modes and assign it to SA.
Here you have to create new flight mode "Rescue" and assign it to SG.
Make sure to change position accordingly, because position determines priority.
And lastly you have to setup Gyro Gains for each Flight Mode.
Check my screenshots.
This is the simplest way.
There is no mix or logical switch, SG will activate the rescue or stabilisation - depends on the current bank.
Spirit System developer
Re:
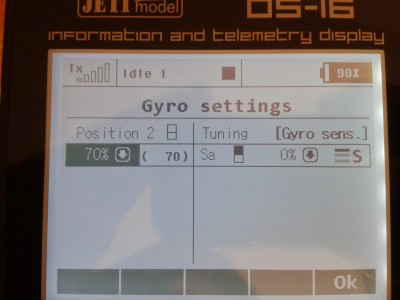
When I set my value to 70 here, my tail servo stops responding. I actually had to use a value of 49%. Anything higher than that and the tail servo starts to cycle back and forth erratically then it just stops responding to input.
Did I do something wrong?
Jeti DS14, Jeti R7 REX, Spirit Pro/EX Bus, MKS 669 Tail servo set to 760us @560Hz
When I set my value to 70 here, my tail servo stops responding. I actually had to use a value of 49%. Anything higher than that and the tail servo starts to cycle back and forth erratically then it just stops responding to input.
Did I do something wrong?
Jeti DS14, Jeti R7 REX, Spirit Pro/EX Bus, MKS 669 Tail servo set to 760us @560Hz
The problem may be in travel range - it probably exceeds 100% in the diagnostic tab.
You can change travel for each channel in your transmitter to 68% - this should match with -100 to 100% in the unit exactly.
You can change travel for each channel in your transmitter to 68% - this should match with -100 to 100% in the unit exactly.
Spirit System developer